awa sorgt für Sauberkeit auf öffentlichen Plätzen und schont dabei Menschen, Tiere und Umwelt.
Ein Projekt von Lisa Hofstädter, Mekong Lam, Sebastian Schuchmann und Dogukan-Deniz Yoltay
4. Semester, 2017
Betreut von Claudius Coenen, Sebastian Fritzsche, Andrea Krajewski, Tsune Tanaka, Stefan Voigt
Interactive Media Design
awa ist ein intelligentes System, das sich der Müllentsorgung in öffentlichen Bereichen, spezieller in Parkanlagen, annimmt. Das System besteht aus autonomen mobilen und statischen Einheiten, die sich untereinander organisieren und verständigen und in der Lage sind, Müll wahrzunehmen, korrekt einzuordnen und zu entsorgen. Im Fokus stehen dabei sowohl die effiziente und umweltschonende Entsorgung des Mülls als auch das Wohlbefinden von Mensch und Tier.
Um mit unserem System wirklich eine positive Veränderung zu bewirken, muss es sich problemlos in den Alltag von Mensch und Tier integrieren. Dafür haben wir uns von anderen Parkbewohnern inspirieren lassen. Wir haben versucht, das Wesen und die Verhaltensweisen von Tieren zu adaptieren und auf unser System zu übertragen. In einer kleinen Studie haben wir getestet, wie Menschen und Tiere auf unser System reagieren. Was dabei herausgekommen ist, seht ihr in unserem Trailer.

awa besteht aus zwei Komponenten. Den mobilen und der statischen Einheit. Die mobilen Einheiten unterteilen sich wiederum in zwei Arten. Einer sehr kleinen Einheit für Zigarettenabfälle und einer größeren für sonstigen Abfall. Da die mobilen Einheiten am meisten mit den Parknutzern in Kontakt stehen, haben wir versucht, sie in Sachen Form, Wesen und Verhalten an Tiere erinnern zu lassen, die einem im Park über den Weg laufen könnten.
Die mobilen Einheiten zeichnen sich durch einen sehr zurückhaltenden und defensiven Charakter aus. Sie meiden Menschen und Tiere und versuchen, ungestört ihrer Arbeit nachzugehen und dabei auch andere nicht einzuschränken.
Da die statische Einheit nur zur Trennung und Aufbewahrung des Mülls dient, sind wir auf diese in der Gestaltung nicht explizit eingegangen.

Damit die mobilen Einheiten immer wissen, wo sie nach Müll suchen sollen, kommunizieren sie mit der statischen Einheit. Diese kennt ihren Standort und gibt den mobilen Einheiten ihre Route vor. Die mobilen Einheiten versuchen stets, Menschen und Tieren auf ihrem Weg auszuweichen. Auch bei der Müllsuche selbst fahren sie langsamer, wenn sie Menschen in ihrer Nähe wahrnehmen.
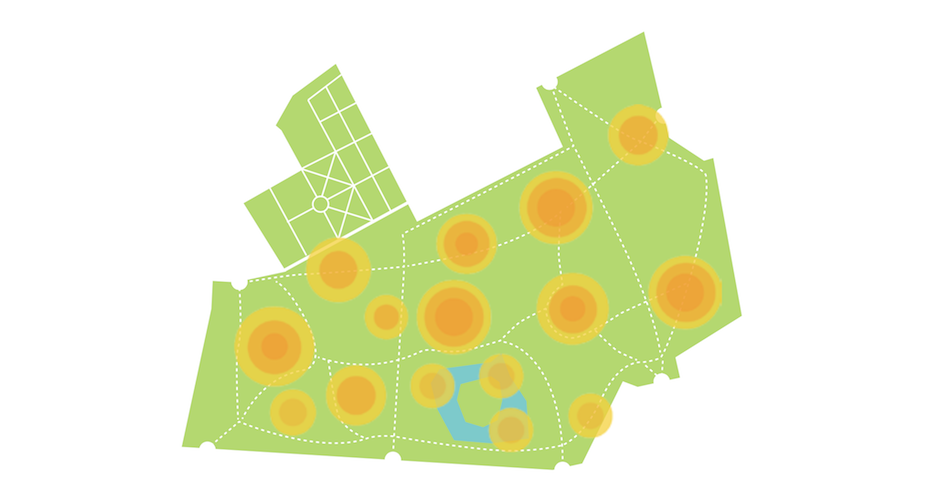
Während der Müllsuche generieren die mobilen Einheiten eine so genannte Heat Map. Das bedeutet, sobald eine Einheit Müll gefunden hat, sendet sie ein Signal an die statische Einheit, die den Standort der mobilen Einheit dann auf einer virtuellen Karte speichert und diese an die mobilen Einheiten zurücksendet. So wissen die mobilen Einheiten, wo häufig Müll gefunden wird und an welche Orte sie häufig zurückkehren sollten.
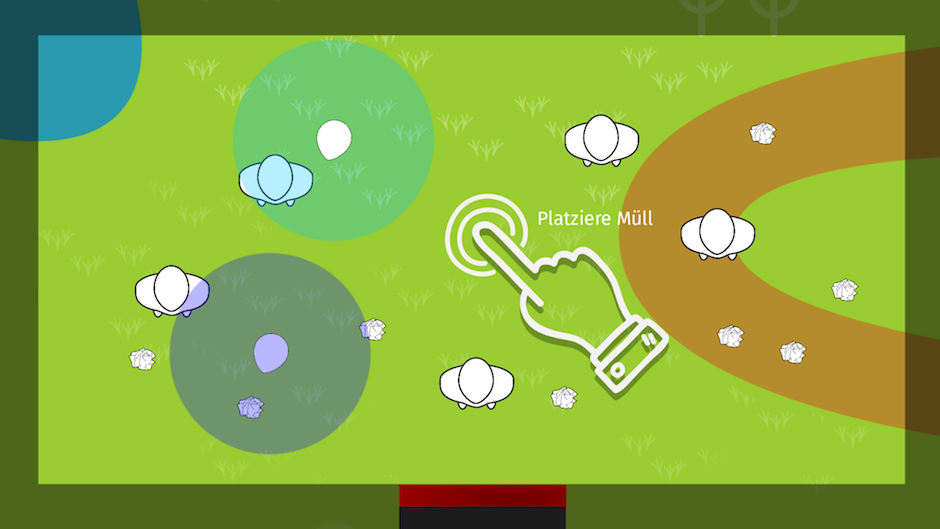
Neben der Formstudie haben wir eine Simulation umgesetzt, in der wir die Funktionen von awa visualisieren wollten. Wir wollten zeigen, wie die mobilen Einheiten sich im Park fortbewegen, wie sie kommunizieren, Müll sammeln und abladen.
Es befinden sich Menschen und Müll auf der Flächen. Dazwischen fahren mobile Einheiten umher und sammeln den Müll ein und weichen den Menschen aus.
Jede Einheit besitzt einen Füllstand und wenn dieser voll ist, fährt sie zurück zur statischen Einheit am
unteren Rand des Bildschirms, um abzuladen. Der Nutzer kann ständig Müll platzieren, um die mobilen Einheiten beschäftigt zu halten und dabei beobachten, wie sie mit der sich stets verändernden Situation umgehen.